Intelligent Machines
Robotic Insect Takes Off
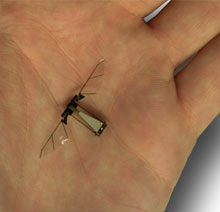
Researchers have created a robotic fly for covert surveillance.
A life-size, robotic fly has taken flight at Harvard University. Weighing only 60 milligrams, with a wingspan of three centimeters, the tiny robot’s movements are modeled on those of a real fly. While much work remains to be done on the mechanical insect, the researchers say that such small flying machines could one day be used as spies, or for detecting harmful chemicals.
“Nature makes the world’s best fliers,” says Robert Wood, leader of Harvard’s robotic-fly project and a professor at the university’s school of engineering and applied sciences.
The U.S. Defense Advanced Research Projects Agency is funding Wood’s research in the hope that it will lead to stealth surveillance robots for the battlefield and urban environments. The robot’s small size and fly-like appearance are critical to such missions. “You probably wouldn’t notice a fly in the room, but you certainly would notice a hawk,” Wood says.
Recreating a fly’s efficient movements in a robot roughly the size of the real insect was difficult, however, because existing manufacturing processes couldn’t be used to make the sturdy, lightweight parts required. The motors, bearings, and joints typically used for large-scale robots wouldn’t work for something the size of a fly. “Simply scaling down existing macro-scale techniques will not come close to the performance that we need,” Wood says.
Some extremely small parts can be made using the processes for creating microelectromechanical systems. But such processes require a lot of time and money. Wood and his colleagues at the University of California, Berkeley, needed a cheap, rapid fabrication process so they could easily produce different iterations of their designs.
Ultimately, the team developed its own fabrication process. Using laser micromachining, researchers cut thin sheets of carbon fiber into two-dimensional patterns that are accurate to a couple of micrometers. Sheets of polymer are cut using the same process. By carefully arranging the sheets of carbon fiber and polymer, the researchers are able to create functional parts.
For example, to create a flexure joint, the researchers arrange two tiny pieces of carbon composite and leave a gap in between. They then add a sheet of polymer perpendicularly across the two carbon pieces, like a tabletop on two short legs. Two new pieces of carbon fiber are placed at either end of the polymer, as a final top layer. Once all the pieces are cured together, the resulting part resembles the letter H: the center is flexible but the sides are rigid.
By fitting many little carbon-polymer pieces together, the researchers are able to create rather complicated parts that can bend and rotate precisely as required. To make parts that will move in response to electrical signals, the researchers incorporate electroactive polymers, which change shape when exposed to voltage. The entire fabrication process will be outlined in a paper appearing in an upcoming edition of the Journal of Mechanical Design.
After more than seven years of work studying flight dynamics and improving various parts, Wood’s fly finally took off this spring. “When I got the fly to take off, I was literally jumping up and down in the lab,” he says.
Other researchers have built robots that mimic insects, but this is the first two-winged robot built on such a small scale that can take off using the same motions as a real fly. The dynamics of such flight are very complicated and have been studied for years by researchers such as Ron Fearing, Wood’s former PhD advisor at the University of California, Berkeley. Fearing, who is building his own robotic insects, says that he was very impressed with the fact that Wood’s insect can fly: “It is certainly a major breakthrough.” But Fearing says that it is the first of many challenges in building a practical fly.
At the moment, Wood’s fly is limited by a tether that keeps it moving in a straight, upward direction. The researchers are currently working on a flight controller so that the robot can move in different directions.
The researchers are also working on an onboard power source. (At the moment, the robotic fly is powered externally.) Wood says that a scaled-down lithium-polymer battery would provide less than five minutes of flying time.
Tiny, lightweight sensors need to be integrated as well. Chemical sensors could be used, for example, to detect toxic substances in hazardous areas so that people can go into the area with the appropriate safety gear. Wood and his colleagues will also need to develop software routines for the fly so that it will be able to avoid obstacles.
Still, Wood is proud to have reached a major project milestone: flight. “It’s quite a major thing,” he says. “A lot of people thought it would never be able to take off.”